
Jinhui Zhang – författare

2 038 kr
Skickas inom 10-15 vardagar
2 579 kr
Läs direkt efter köp
908 kr
Läs direkt efter köp
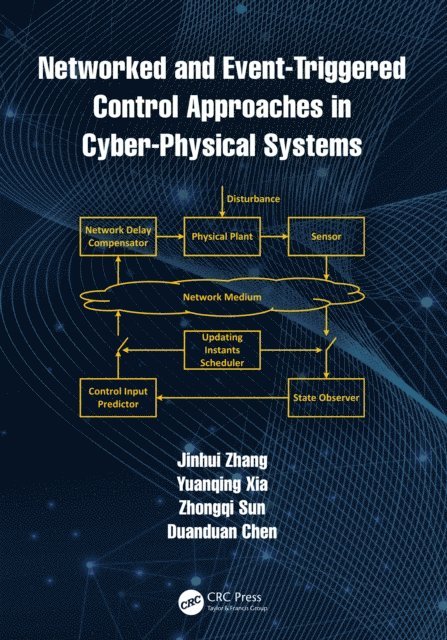
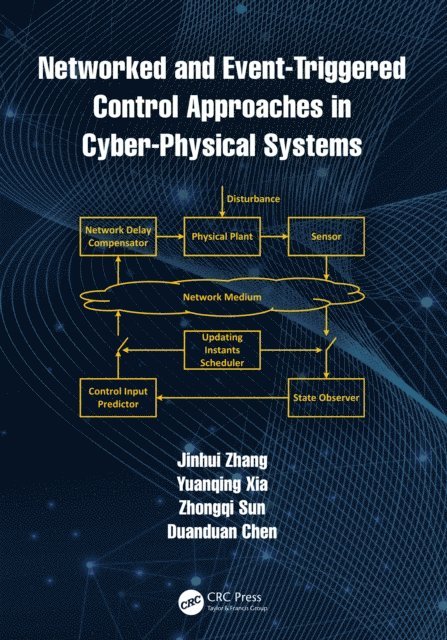
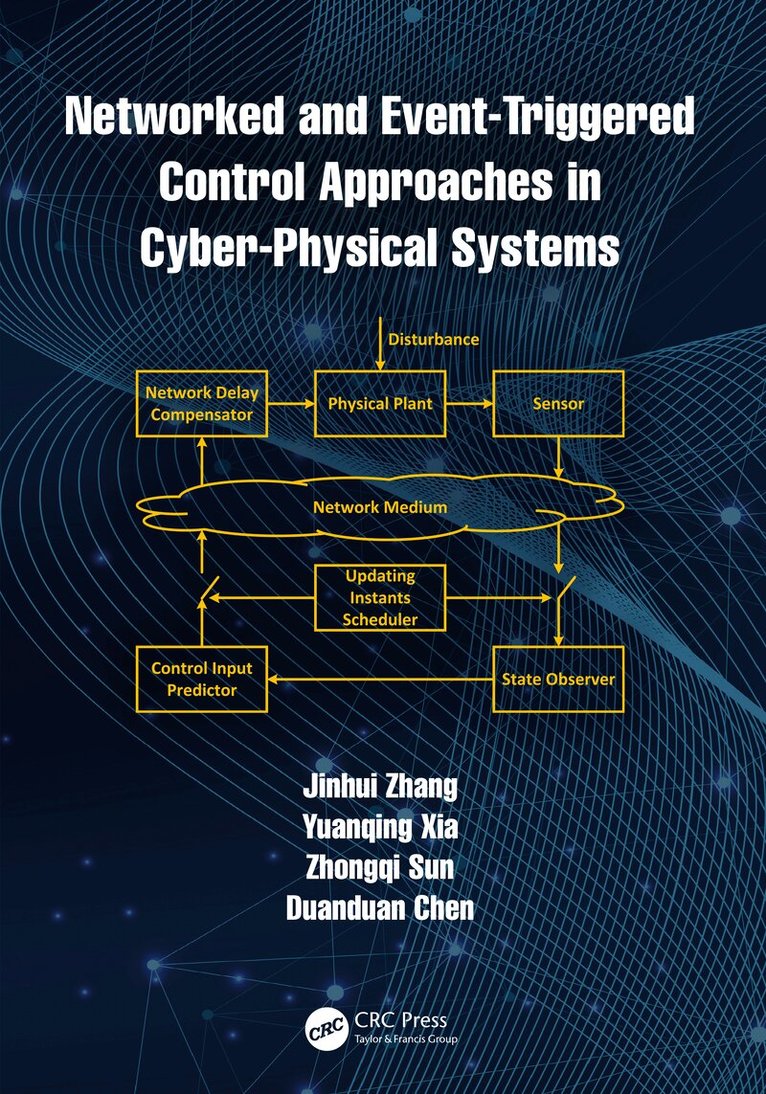
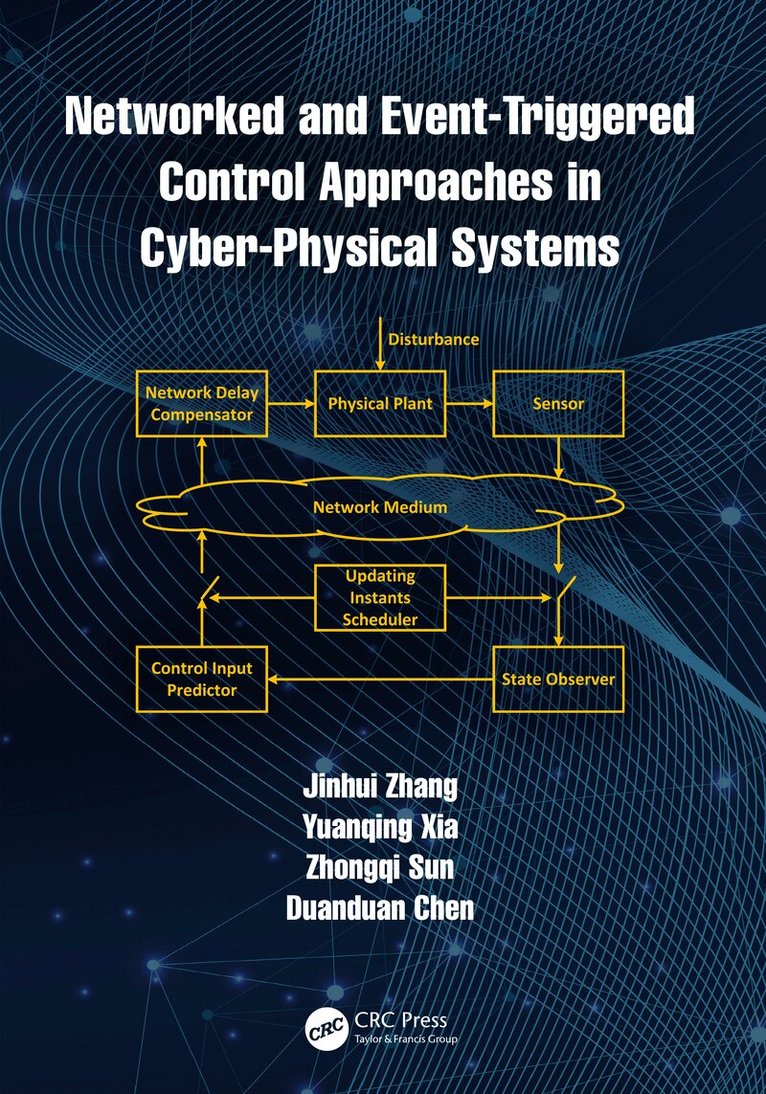
The insertion of communication networks in feedback control loops complicates analysis and synthesis of cyber-physical systems (CPSs), and network-induced uncertainties may degrade system control performance. Thus, this book researches networked delay compensation and event-triggered control approaches for a series of CPSs subject to network-induced uncertainties.
The authors begin with an introduction to the concepts and challenges of CPSs, followed by an overview of networked control approaches and event-triggered control strategies in CPSs. Then, networked delay compensation and event-triggered control approaches are proposed for CPSs with network communication delay, data dropout, signal quantization, and event-triggered communication. More specifically, networked delay compensation approaches are proposed for linear/nonlinear networked controlled plants with time-varying and random network communication delays and data dropouts. To reduce computational burden and network communication loads in CPSs, event-triggered control, self-triggered control, co-design of event-triggered control and quantized control techniques, and event-triggered disturbance rejection control approaches are also presented.
This book is an essential text for researchers and engineers interested in cybersecurity, networked control, and CPSs. It would also prove useful for graduate students in the fields of science, engineering, and computer science.
908 kr
Läs direkt efter köp
The insertion of communication networks in feedback control loops complicates analysis and synthesis of cyber-physical systems (CPSs), and network-induced uncertainties may degrade system control performance. Thus, this book researches networked delay compensation and event-triggered control approaches for a series of CPSs subject to network-induced uncertainties.
The authors begin with an introduction to the concepts and challenges of CPSs, followed by an overview of networked control approaches and event-triggered control strategies in CPSs. Then, networked delay compensation and event-triggered control approaches are proposed for CPSs with network communication delay, data dropout, signal quantization, and event-triggered communication. More specifically, networked delay compensation approaches are proposed for linear/nonlinear networked controlled plants with time-varying and random network communication delays and data dropouts. To reduce computational burden and network communication loads in CPSs, event-triggered control, self-triggered control, co-design of event-triggered control and quantized control techniques, and event-triggered disturbance rejection control approaches are also presented.
This book is an essential text for researchers and engineers interested in cybersecurity, networked control, and CPSs. It would also prove useful for graduate students in the fields of science, engineering, and computer science.
1 476 kr
Skickas inom 10-15 vardagar
770 kr
Skickas inom 10-15 vardagar
1 620 kr
Skickas inom 10-15 vardagar
2 049 kr
Läs direkt efter köp
1 620 kr
Skickas inom 10-15 vardagar
1 728 kr
Skickas inom 10-15 vardagar
2 207 kr
Läs direkt efter köp
This book focuses on pneumatic servo systems analysis, control and application in robotic systems. The pneumatic servo systems are composed by pneumatic artificial muscles or cylinders, which are two important pneumatic actuators in industrial application. The active disturbance rejection control technique is used effectively to solve strong nonlinearity and uncertain factors for the pneumatic servo systems. Nonlinear feedback control, back-stepping control, finite-time control, sliding mode control and several other control laws are proposed to make the pneumatic servo systems have better control performances. The book establishes a fundamental framework for this topic, while emphasizing the importance of integrated analysis. The book is intended for undergraduate and graduate students who are interested in this field and engineers working on the applications of pneumatic servo systems.
Advances in Industrial Control reports and encourages the transfer of technology in control engineering. The rapid development of control technology has an impact on all areas of the control discipline. The series offers an opportunity for researchers to present an extended exposition of new work in all aspects of industrial control.
1 728 kr
Skickas inom 10-15 vardagar