Del 55
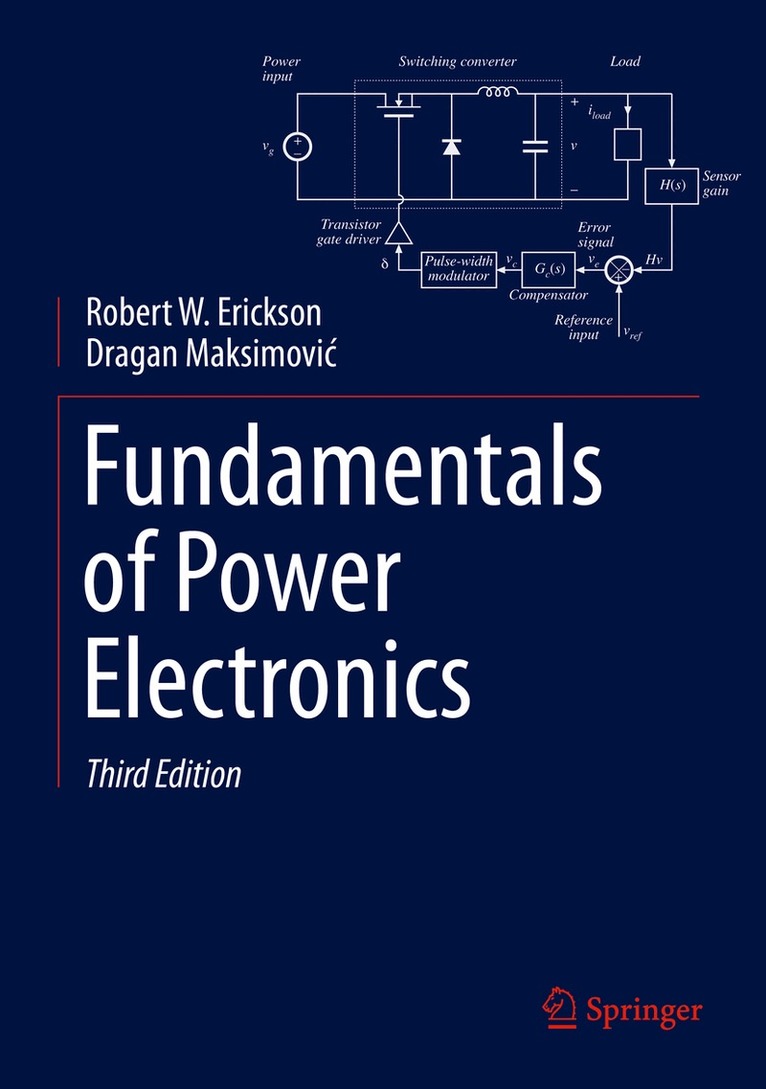
AvLuca Corradini,Dragan Maksimovic
Del i serien IEEE Press Series on Power and Energy Systems
1 338 kr
Beställningsvara. Skickas inom 7-10 vardagar. Fri frakt över 249 kr.
Math H. J. Bollen, Fainan Hassan
1 661 kr
Geoff Klempner, Isidor Kerszenbaum
2 043 kr


S. C. Savulescu
1 642 kr

Anders Hansen
289 kr